Aviation Investigation Report A09W0146
Loss of Control – Tail Strike
Wild Water Heli-Fishing Ltd.
Robinson R44 Raven II (Helicopter) C-GNYT
Nahanni Butte, Northwest Territories, 17 nm W
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content.
-
Table of contents
Summary
The Robinson R44 Raven II (registration C-GNYT, serial number 10883) operated by Wild Water Heli-Fishing Ltd., departed Nahanni Butte, Northwest Territories, with a pilot and two passengers on board for a day visual flight rules flight. At 1655 Mountain Daylight Time, during an aborted landing on a narrow ridge in steep mountainous terrain, the helicopter turned 180 degrees and descended down a slope. The tail boom struck the ground, and the helicopter tumbled down the mountain side, breaking up and coming to rest about 900 feet below the ridge. The helicopter was destroyed by a post-impact fire. The emergency locator transmitter on board did not transmit. The pilot survived with serious injuries, and both passengers sustained fatal injuries.
Factual information
History of the Flight
The helicopter was contracted by an outfitter to transport two passengers to a hunting area about 25 nautical miles (nm) west of Nahanni Butte, Northwest Territories. While en route, C‑GNYT flew over four individuals on a ridge―guides and hunters―that would later have to be transported. After the guides and hunters waved at the helicopter to indicate their position, the pilot decided to land to speak with them.
After a circling descent to the northeast, the pilot conducted a shallow straight-in approach from the southeast at about 60 degrees to the ridge. Using hand signals previously agreed to with the pilot, one of the guides on the ridge indicated the best available landing area and wind. Since the ground party was grouped near the landing area, the pilot slowed the approach to allow them time to move away.
As the helicopter neared the ridge, it entered turbulence and yawed slightly from side to side. Rotor speed deteriorated and the sink rate increased. The low rotor revolutions per minute (rpm) warning horn sounded. Footnote 1 The pilot attempted to abort the landing initially by overshooting straight ahead over the ridge. Concerned that the ground party near the landing area was in harm’s way, the pilot at the last minute turned away from the ridge. The pilot applied right pedal, turning 60 degrees, and attempted to dive down the steep slope to regain rotor rpm . The tail rotor and tail boom struck the ground on the ridge at a height 4600 feet above sea level (asl). Footnote 2 The helicopter spun out of control, with the main rotor blades striking the ground. The helicopter then rolled down the slope that was estimated at about 45 degrees. Parts, including the tail boom and the main rotor system, were shed during the descent. An intense fire broke out in the main wreckage after it came to rest at the 3900-foot level of the ridge.
Survivability
All occupants were wearing three-point harnesses. However, the retention system failed due to structural disintegration during the crash. The pilot was ejected from the helicopter as it tumbled down the slope, came to rest about 150 feet uphill from the main wreckage and sustained non–life-threatening serious injuries. At the time of the accident, the pilot was not wearing a helmet. Both passengers succumbed to blunt force trauma injuries. One passenger was found with the main wreckage, and the other was found 10 feet uphill.
The ground party immediately notified the outfitter of the accident by satellite telephone. A rescue party, dispatched via helicopter from Fort Simpson, Northwest Territories, 90 nm northeast of the site, evacuated the pilot five hours after the accident. The accident helicopter was equipped with a global positioning system (GPS)–based position tracking device, which was used to help find the site. No signal was received from the 406 MHz emergency locator transmitter, likely due to destruction by fire.
Company Operation
Wild Water Heli-Fishing Ltd. held a valid Air Operator Certificate for air taxi operations issued by Transport Canada (TC) under subpart 703 of the Canadian Aviation Regulations. The accident helicopter was the only aircraft operated by the company. The pilot fulfilled the duties of chief pilot and operations manager. Maintenance was contracted to a TC approved maintenance organization (AMO) near the company’s main base at Fort Steele, British Columbia. Running maintenance and routine inspections were carried out at Nahanni Butte by a separate AMO based at Fort St. John, British Columbia.
Aircraft Information
Wild Water Heli-Fishing Ltd. had been the owner of C-GNYT since 2006. Technical logs and maintenance records indicated that the helicopter was certified, equipped and maintained in accordance with existing regulations and approved procedures.
In March 2009, Robinson Helicopter Company issued Service Bulletin SB-68, which called for the replacement of a rigid engine fuel supply line with a flexible one to reduce the likelihood of a post-accident fuel leak. This service bulletin was applicable to C‑GNYT and was completed in May 2009.
Weather
At the site, winds were light from the west, and the temperature was estimated at 20 °C with a clear sky. This was consistent with automatic observations at Environment Canada’s Yohin, Northwest Territories, weather facility, 19 nm northeast. A search and rescue Bell 206B helicopter, which arrived at the accident site within two hours, encountered moderate turbulence and downdrafts in the vicinity of the ridge.
Weight and Balance
In accordance with company practice, the passengers and cargo were weighed before being loaded on the aircraft at Nahanni Butte. The helicopter was fuelled to approximately half of total capacity for a weight of 135 pounds. At the time of the occurrence, the aircraft weight was 2385 pounds, 115 pounds below maximum weight. The weight and centre of gravity were within prescribed limits.
Aircraft Performance
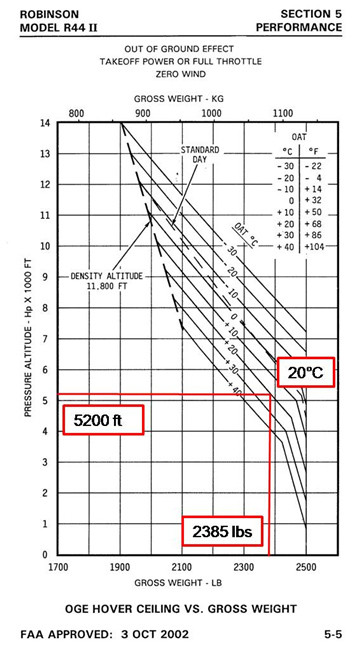
The engine was developing full available power and no mechanical flight control difficulties were encountered during the occurrence. Performance charts in the pilot’s operating handbook indicate that, at 2385 pounds, at 20 °C , zero wind and 100 per cent main rotor rpm , the maximum pressure altitude for hover out of ground effect is 5200 feet (see Appendix A). The maximum pressure altitude for hover in ground effect under the same conditions is 8760 feet, which indicates a large difference in power requirements between hover in and out of ground effect. The pressure altitude at the attempted landing site was 5100 feet, where the helicopter would be operating with an out of ground effect margin of 100 feet.
Landing Site
The 4600-foot ridge was oriented at about 025/205 degrees true. It was above the tree line, mostly razor-backed and uneven in elevation with some flat spots. The proposed landing site was about 20 feet by 25 feet in size. The eastern shale slope was approximately 45 degrees, gradually forming a gully where the main wreckage came to rest.
Pilot Experience and Training
The pilot was certified and qualified for the flight in accordance with existing regulations. A total flying time of 3000 hours, exclusively on the Robinson R44 helicopter, had been accumulated as well as 100 hours on fixed-wing aircraft. The pilot had undergone mountain flight training in 2006, which included 21 hours of flight time. About 2700 hours of mountain flying experience was accumulated in terrain similar to the accident site, which also included landings on the same ridge many times previously. On the day of the occurrence, the pilot’s duty day began at 0900 Footnote 3, after having nine hours of rest.
Mountain Flying Techniques
A light wind striking perpendicular to a ridge line will flow smoothly upslope to the top of the ridge and, after passing the peak, will begin to descend, flowing down the lee slope (see Figure 1). Turbulence can be associated with the transition over the peak. Pilots of aircraft entering the region downwind near a ridge line can expect to use higher engine power settings to maintain altitude in the descending air. It is possible that the power necessary to maintain altitude will exceed that available. Attempts to maintain altitude by increasing rotor pitch can demand engine power beyond the aircraft’s capability, resulting in a loss of rotor speed.

Techniques have been developed to minimize the risk inherent in mountain flying operations. The first step is to reconnoitre the intended landing spot to determine site elevation, wind direction, power requirements, and approach path. An important consideration for reconnaissance and landing approach is planning for a drop-off zone to safely fly away should conditions exceed safe handling and power requirements.
Flight procedures for razor-back ridge-line operations typically involve conducting figure 8 reconnaissance passes along the ridge at constant speed. This can be followed by an aborted approach to confirm conditions. The final approach to the landing zone consists of conducting a gradual decelerating shallow descent slightly above and parallel to the ridge and, as much as possible, into wind. This allows for early loading of the rotor disc to stabilize the approach and aid in assessing power requirements and wind.
The transition from effective translational lift Footnote 4 to the ground effect Footnote 5 is accomplished while keeping last-minute power changes to a minimum. This avoids either a flare or coming to a stop while out of ground effect; both conditions can demand more power than the engine may be able to supply to arrest an uncontrolled descent. It also provides the best option of aborting the landing into wind in the up-flow with the lowest power requirements. The pilot of C-GNYT had been trained and was experienced in these techniques.
Conducting a shallow perpendicular approach on the downwind side of a ridge line exposes a helicopter to subsiding air. This substantially reduces the option of entering a safe drop-off zone in up-flowing air, thus avoiding the need for high engine power.
Analysis
There was no mechanical malfunction of the aircraft. Therefore, this analysis will focus on environmental, geographical and operating factors.
After overflying the ridge en route to the destination, the helicopter turned for a shallow approach, 60 degrees to the ridge. The shallow approach was part of the recommended technique. The approach path downwind of the ridge, however, would have exposed the helicopter to subsiding air near the ridge. As the helicopter slowed through the speed where effective translational lift was lost before it entered the ground effect on the narrow ridge top, rotor pitch had to be increased substantially, accompanied by an increase in engine power. Since the helicopter’s ability to hover out of ground effect was marginal under ideal wind conditions, its ability to do so in subsiding air was substantially reduced.
With deteriorating rotor speed and aircraft controllability nearing the landing zone, the pilot was faced with three choices: overshooting straight ahead, landing hard on uneven terrain on the ridge top, or turning around and attempting to dive down the steep slope. The option of continuing straight ahead into wind posed a risk of injuring the ground party near the landing zone either by striking them on the overshoot or by subjecting them to injury from the helicopter had it rolled over on uneven terrain on the ridge top. Diving off the ridge may have afforded space to allow a reduction of main rotor pitch and a recovery of rotor speed. However, placing the helicopter downwind with deteriorating rotor speed precluded maintaining sufficient height above the ridge to avoid striking the tail on the ground.
The aircraft’s structural integrity was completely lost as it tumbled down the slope, with failure of the occupant retention systems.
Findings
Findings as to causes and contributing factors
- The shallow approach downwind of the ridge placed the helicopter in an area of subsiding air, which increased the sink rate.
- To overcome the sink rate, the pilot had to demand more engine power than was available, resulting in a loss of rotor speed.
- To avoid injury to persons in the landing area, the pilot aborted the landing by turning 60 degrees.
- During the aborted landing, the helicopter’s tail struck the top of the ridge, precipitating a fall down the steep shale slope, culminating in complete destruction of the helicopter and a post-crash fire.
This report concludes the Transportation Safety Board’s investigation into this occurrence. Consequently, the Board authorized the release of this report on .
Appendices
Appendix A – Hover Out of Ground Effect – Robinson R44 Raven II